特斯拉推出Deep Rain 为提升自动雨刮的表现
2019-10-16 11:09:54 来源: GeekPark极客公园

不完美却可以通过软件升级持续变得完美,这是智能电动汽车的独特魅力。深度神经网络,这个出现在人工智能相关新闻中的高频词汇,你可能压根想不到会有一天和汽车的雨刮器扯上关系。近日,特斯拉CEO马斯克宣布推出一个全新的神经网络“Deep Rain”,目的仅仅是为了提升自动雨刮系统的表现。而这个功能之前一直被很多特斯拉用户所诟病。

特斯拉Roadster跑车的雨刮系统 | Teslarati
和很多豪华车一样,特斯拉全系车型都配置了自动雨刮系统,它能够根据降雨或降雪量的密集程度自动调整雨刮器的清扫速度。只不过马斯克始终在设计上不愿落于窠臼,所以这套系统并不是基于内置的传感器进行感应进而触发工作,而是利用Autopilot的摄像头为深度神经网络提供图像数据,让人工智能来决定雨刮器运行的速度。
这套系统是2018年开始在特斯拉车型上开始部署的,但有部分车主一直在抱怨它的灵敏性不够高,不如其他使用雨水传感器的系统用起来那么准确。
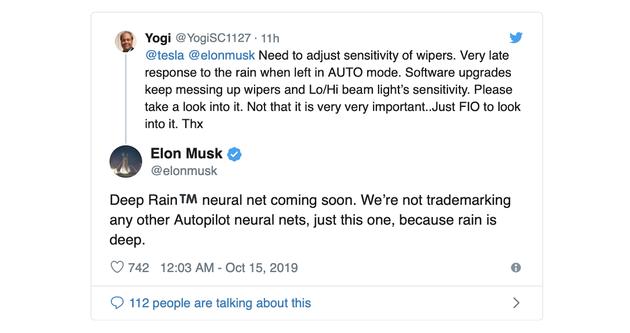
特斯拉 CEO马斯克在Twitter上公布将会推出全新的“深度雨水神经网络”| 网站截图
现在马斯克亲自出来说话了,表示特斯拉为这套雨刮系统提供了全新的深度雨水神经网络(Deep Rain neural network)。只不过从他嘴里讲出来,多少有点像开玩笑的感觉,所以马斯克强调了这件事的真实性,称“这是一个全新的、改良过的深度神经网络,经过大量数据训练后能够更精确地对雨刮器的开启时机和运行速度进行调节。”
他还介绍称,全新的“深度雨水神经网络”能够对道路受雨雪影响的程度进行检测,假设用户开启了 Autopilot 功能,那么它会根据系统探测到的情况来自动调节车速。
据极客公园(ID:geekpark)了解,这套神经网络将会通过OTA的方式进行更新,而且它并不需要最新的3.0版本的计算硬件系统支持,旧版本同样适用,但马斯克并未透露具体时间。此外,在软件更新之外,特斯拉也在计划推出新的雨刮硬件系统。
今年九月中旬,外媒Electrek发布了一张专利图,显示特斯拉正在开发某种看起来十分前卫的电磁雨刮器。
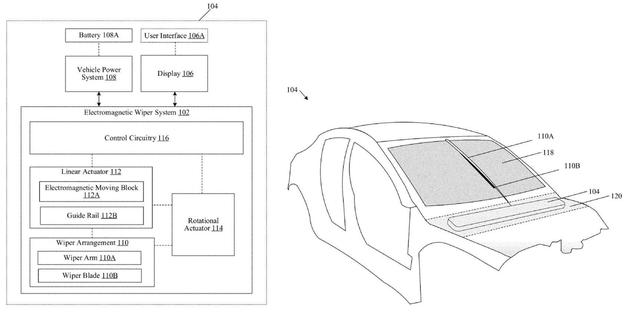
特斯拉电磁雨刮器新专利图 | Electrek
而之所以在开发这种新型的雨刮器,是因为特斯拉认为目前传统的雨刮系统通常由多个雨刮片组成,但它们往往设计复杂却不能充分清洁玻璃,在驾驶员或车载摄像头需要获得清晰的视野时(例如驾驶辅助或自动驾驶模式下),还可能出现影响其无法看清前方道路的情况。
特斯拉还指出,传统雨刮系统机械部件比较多,在频繁使用过程中可能导致很快磨损。而且这类运动会产生很大的摩擦,进而需要车载动力电池提供额外的能量供应,最终导致车辆的续航减少。而且汽车的风挡一般都是弯曲的玻璃,很难设计出双雨刮器的系统。
所以特斯拉设计的全新电磁雨刮器,采用与挡风玻璃匹配的单雨刮片,而且会和引擎下方的电磁系统一同移动。它可能还会包括一个线性驱动器,该驱动器由一条导轨以及电磁运动块组成。此外,本发明中的电磁雨刮器系统还包括控制电路,以控制电磁运动块穿过多个永磁棒的线性运动。此类线性运动得到控制就可以引导雨刮臂的转向,而该雨刮臂会耦合在电磁运动块上,能够在整块挡风玻璃上来回移动,以擦拭特定区域,如挡风玻璃的透明区域(即占挡风玻璃百分之一的区域)。
值得一提的是,永磁棒穿过多个电磁线圈围绕的多个孔,从而导致电磁运动块在进行线性运动时,摩擦力达到最小。此外,本发明中的电磁雨刮器系统可能会采用电磁运动块当前所携带的电磁线圈产生的电磁感应式电动力,以控制雨刮臂,因而能够有效地将传统雨刮器系统部件兼的摩擦力降至最小。
目前这套设计尚处于设计开发初期,可能最后产品的成型与专利图还会有出入。只不过在等来新型电磁雨刮器系统之前,特斯拉的用户们会借助持续更新的“深度雨水神经网络”来获得更好的使用体验。这在传统汽车时代是不可想象的,所以尽管它不完美但却可以通过软件升级持续变得完美,这是智能电动汽车的独特魅力。
每日热点
-

三亚对新能源换电汽车推广专门给予分梯度的补能差价补贴 最高补贴1万元
-
消费电子行业进入“寒冬”,看一绳CableCreation如何拿到未来市场入场券
-

三星Odyssey OLED G8带鱼屏显示器上市 内置集成5W立体声扬声器
-

德国计划将在未来三年内投入63亿欧元在全国范围内迅速扩大电动汽车充电站的数量
-

三星电子宣布2亿像素系列传感器再添新成员 占用更少相机模组面积
-

爆料称:iPhone SE 4将采用类似iPhone XR的外观设计
-

谷歌推出了专门针对入门手机的Android 13 Go精简版操作系统
-

EA888发动机出大事 大众汽车将在海外市场召回74067台车辆
-

一加11工程机参数出炉:支持LTPO自适应刷新率
-

Nothing Ear(1)无线耳机将涨价50% 全球已有近60万销售量
-

十铨推出业界首款CPU+SSD双冷头水冷散热器 将自 11 月起上架贩卖
-

ROG发布新款Swift PG27AQN显示器 超频刷新率可达360Hz
-

三星将与Maison Margiela马吉拉带来一款联名新品
-

消息称:台积电的3纳米芯片生产已被推迟到2022年第四季度
-

迎广新款A3/A5机箱上市:支持长度达340mm的高阶显卡
-

联想拯救者2023款旗舰游戏电脑将搭载最新的13代英特尔酷睿i9处理器
-

宏碁ConceptD 500上架京东:主打时尚设计和安静运行
-

苹果iPad全系去掉了3.5mm耳机孔 Lightning接口换成了USB-C接口
-

海信Vidda发布音乐电视MUS:采用Vidda夜莺独立修音声卡
-

索尼A7R5旗舰相机新爆料:支持运动矫正 有望让手持像素偏移拍摄成为可能
-

HKC公布新款MiniLED显示器:采用了27英寸Fast VA面板
-

KKR计划进军日本市场,主要原因系日元汇率达32年来最低点-世界热资讯
-

中化岩土:公司之前完成过沙特阿拉伯的工程项目。公司目前未参与沙特新城的建设-焦点观察
-

华控赛格:关于公司及子公司经营业绩情况,详见后续定期报告相关章节,敬请关注-焦点热闻
-

诺基亚C31将正式开售:搭配3D水波纹背壳设计与后置指纹识别
-

青海海西州茫崖市发生5.5级地震 震源深度11千米
-

夫妻用苹果给1岁半的女儿做薯条汉堡套餐:惟妙惟肖
-

《阿凡达2:水之道》片长为190分钟 北美上映定档12月16日
-
查尔斯三世和戴安娜王妃婚礼上的一块水果蛋糕将被拍卖 售价至少2500元
-

泉州发现明万历三十二年铸造文物大钟一座 至今钟声洪亮
-

劳斯莱斯首款纯电动车闪灵已正式发布 第四季度实现交付
-

索尼升级版PS5 Pro来了:机身2TB硬盘、进一步改良散热
-

爱玛科技前三季度归母净利润13.76亿元 同比增长138%
-

联想小新熊猫黑白激光智慧多功能一体机特价 打印、复印、扫描3合1
-

飞天云动“元宇宙”资本梦:股价破发前景堪忧,研发能力差距不小-速读
-

唐人神:谢谢您的提问。公司三季度经营情况届时请详见公司后续披露的三季报-世界新视野
-

咸亨国际:清洁低碳目前已成为我国能源结构调整和优化的战略方向,而电网是构建新型电力系统的关键环节-焦点消息
-
拯救者M7电竞鼠标公布:全新外观设计 支持三模
-
河南夏粮丰收产量762.6亿斤 全国一半火腿肠都产自河南
-

一种奥密克戎新型变异毒株BQ.1.1正在欧洲国家蔓延开来
-
中东地区第一家大熊猫馆建立:两只大熊猫将入驻
-
消息:第二代ThinkPad X1 Fold能够选择i5-1230U或i7-1260U处理器
-

龙泉山一号隧道顺利贯通 历经25个月的艰苦建设
-
中兴远航40 Pro+亮相 新机后摄采用竖向双圆环设计
-
我国首次在寒武系筇竹寺组地层取得页岩气勘探的重大突破
-

荷兰ASML发布了Q3季度财报 EUV光刻机狂卖268亿元
-
中国成功运行世界收割电磁撬设施 将1吨重及以上的物体加速到1000公里/小时的速度
-

iPhone SE 4渲染图曝光:将采用类似iPhone XR的外观设计
-
iPad 10正式开启预售:iPhone 12同款A14芯片加持
-
酷比魔方iPlay 50平板电脑正式发布 主打学生、老人等群体
-
马斯克:特斯拉的市值有可能超过苹果和沙特阿美的总和
-

佳沃食品:公司生产经营一切正常。核心资产Australis盈利大幅恢复性提升-今日关注
-
正邦科技:10月18日公司高管郭祥义减持公司股份合计2万股-当前独家
-

TCL中环三季报业绩增长逾八成-当前热闻
-

快递企业9月份营收再攀升 单票收入同比增长-聚看点
-

美亚柏科:与最高法搭建区块链有合作,是该链节点之一-世界热资讯
-

10月19日京北方涨停分析:跨境支付,国产软件,区块链概念热股-环球速看料
-

10月19日金财互联涨停分析:跨境支付,云计算数据中心,区块链概念热股-天天要闻
-

10月19日英飞拓涨停分析:智慧安防,区块链,智慧灯杆概念热股-每日速递
-

10月19日万方发展涨停分析:区块链,智能制造,军民融合概念热股-世界即时
-

金利华电董事黄梁因涉嫌危险驾驶:存在可能被进一步采取刑事强制措施-世界快资讯
-

厦门港务:公司目前未开展与天然气相关的销售业务,也未开展与天然气相关的散杂货码头装卸业务-当前视讯
-

东港股份:截至10月10日我公司股东总数为27,636户-天天快资讯
-
群兴玩具:感谢您对公司的关心与关注,公司尚未在数字经济领域开展业务,请您留意公司公告-热点评
-

同兴环保:公司暂无热泵节能产品-全球动态
-

嘉麟杰:公司面料业绩受各项宏观和微观因素影响,具体请您关注公司后续关于业绩的公告-焦点关注
-

奥拓电子:公司海外项目结算以美元为主-天天新资讯
-

长青集团:公司的生物质燃料来自农林业废弃物(如小麦秸秆,玉米芯,树皮等),与我国农业的发展息息相关-世界今日讯
-

OPPO面向印度市场推出了低端的A17智能手机 5000mAh电池
-
周星驰在ins开通首个社交账号 招聘Web3人才
-

双11结算购物车时可以直接给商品添加不同地址合并下单 凑单更方便了
-

海南有螃蟹被吹上码头 给永兴岛码头带来了大自然的馈赠
-

Canalys:全球智能手机市场遭遇连续三季度下跌 三星市场份额达到22%
-

致力于最大限度地降低对环境的影响 苹果iPad机型包装不再使用塑料外膜
-
全国首台光储充检智能超充站正式在福建宁德投用 7-8分钟可补充200公里续航
-
谷歌为安卓平板电脑上的Chrome浏览器推出一系列用户界面更新
-

中国贸促会副会长于健龙会见英国驻华使馆公使衔商务参赞路睿-当前动态
-

《模拟人生4》正式转为免费游戏 可在PC、PS4、PS5等平台免费下载
-

金健米业:公司在乌克兰未发展业务-每日精选
-

华峰超纤:公司目前暂无回购计划,后续如有相关计划,将严格按照相关规定及时履行披露义务-当前短讯
-
华侨城A:您好投资者,公司现阶段市值与内在价值存在一定差距-天天热消息
-
上海莱士:感谢您对我公司的关心和支持! 截止2022年10月10日,公司股东总户数为121,727户-世界今日讯
-

分析师:下一代Apple TV可能会以更低的价位出售
-
苹果发布了iOS 16.1 RC预览版 删除实时活动体育比分
-
全国首位女盾构机司机 95后女生操作盾构机驰骋在百米深的海底
-
网飞宣布联合《釜山行》制作班底再度打造僵尸惊悚剧《先山》
-

苹果为新款iPad专门设计的新款妙控键盘双面夹上架 1999元
-

北京1-9月财政收入超4200亿元 9月当月增速回正
-
iPhone 14 Plus和iPhone 14 Pro Max跌落测试结果出炉
-

邮储银行召开温室气体排放核算启动会
-

中国石化新层系新类型页岩气勘探取得重大突破
-

RCEP红利持续惠企 前三季度太原海关签证金额约5亿元
-

亚马逊云科技将升级推出“汽车行业创新加速计划”2.0
-

各地陆续出台利好政策 7万亿热门赛道彻底火了!医疗、旅游股也涨势喜人
-
债市堪忧 英国央行拟再次推迟发债
-
国际航线复航进行时:日均143班次创新高 哪些航线“上新”?
-

布加迪推全碳纤维智能手表:售价2500美元 车标logo巨大
-
山东护航企业“走出去” 海外知识产权维权最高补贴50万元
-
苹果正削减iPhone14Plus产量 重新评估对该机型的需求
-
欧盟提出新紧急措施应对天然气价格飙升
-
加仓!多只香港科技ETF份额创新高
-
EA将于10月22日起关闭多个老游戏的在线服务
-

浪潮云海超融合一体机提升存储性能 支撑关键业务高效运行-环球微速讯
-

Envision Digital与马来西亚政府机构达成行业优先合作关系-环球观天下
-

欧盟需要为其汽车制造商提供更多激励措施 否则可能会被中国竞争对手夺走市场份额
-

报道:电动汽车制造商VinFast计划在德国、法国和荷兰设立区域总部
-

中航机电:截至2022年10月10日,公司股东总户数为113,473户-今日热议
-

闰土股份:公司主要从事纺织染料、印染助剂和化工原料的研发、生产和销售-环球快资讯
-

德龙汇能:所谓英雄所见略同,君之高见,正同吾家之所谋-热资讯
-

盛帮股份:截至目前公司尚未涉及储能技术-即时焦点
-

今年为支持汽车类展品参展进博会 中国海关总署出台了专门的便利化支持措施促进“展品变商品”
-
Kanye West同意收购社交媒体应用Parler 日活跃用户4万
-
港交所建议设立新渠道 让特专科技公司可于香港交易所上市
-
《复仇者联盟6:秘密战争》推迟到了2026年5月1日上映 钢铁侠或将出现
-
两家公司同日披露百亿级大单 光伏上市公司业绩亮眼
-

消息:苹果更新的Apple TV4 K机型 配备A15仿生芯片
-

财报显示:Netflix第三季度营收达79.26亿美元 同比增长5.9%
-
光伏高端装备服务“双碳”战略 融入“一带一路”打造“中国名片”
-

全球智能手机市场遭遇连续三季度下跌 同比下降9%
-

淘宝上线物流异常订单托管服务 将主动识别并干预消费者的问题物流订单
-
付费自习室下沉县城 河北某县城开办超10家共享自习室
-

研究显示:智能手表的销量在2022年全年将以17%的年增长率增长
-

报道称:特斯拉最快将于11月底向欧洲客户交付Model S Plaid
-
三星电子最新的LPDDR5X DRAM 以 8.5Gbps的业界最快速度通过了验证
-
中国经济面临超预期因素冲击 地方政府专项债券在带动扩大有效投资、稳定宏观经济方面发挥重要作用
-
魅族智能摄像头Pro发布:具有107°超大广角 支持4K录制
-

蔚来在德国、荷兰、丹麦、瑞典开启交付和试驾
-
化肥价格呈下跌趋势 导致市场供过于求 从而颠覆了农作物投入品市场的格局
-

微软收入预计将放缓 因此公司进行了裁员
-

索尼《神秘海域:盗贼遗产合集》PC版将于2022年10月19日正式发售
-

Firefox火狐浏览器106正式版发布:增强PDF阅读器
-
本田推出全新喷气式公务机:搭载四名乘客的航程可达1547海里
-
本次峰会以“数智创新 引领未来银行可持续发展”为主题 旨在搭建银行业互动分享的平台
-

随着多国央行加息之路板上钉钉 黄金与白银19日亚市早盘仍承压 金价报在1652美元
-

集度ROBO-01探月限定版首批1000个“首席体验官”席位已经全部锁定
-

英伟达RTX 4090公版在内的多款型号开售 二手平台已破发
-

智己L7 Snake Performance高性能版推出 新车将于年内正式上市
-

飞利浦Hue Play渐变灯条上市 提供氛围灯效
-
用户吐槽Model 3/Y的底盘太硬 马斯克将提升悬架舒适性
-

《生化危机》发布会于10月21日开展 将采用RE引擎进行重制
-

朗科发布适用于笔记本设备的PCIe4.0固态硬盘 取速度达4800MB/s
-
联想新款ThinkVision P27h-30显示器发布 4窄边2K分辨率
-

Keychron V3机械键盘发布:支持热插拔和开源改键 售价418元起
-
索尼宣布游戏《漫威蜘蛛侠 2》仍将在2023年发售
-
微软宣布推出Windows 10 22H2大版本更新 可手动检查更新下载
-
对于美国电动汽车电池的需求 研究机构:预计2025年需求将超过450GWh
-

数据:今年前9月在德国注册的特斯拉电动汽车数量已经接近38500辆
-
资讯:苹果iPad 10采用直角边框设计 搭载A14处理器配备USB-C接口
-
苹果开始销售贝尔金的新iPhone支架 售价198元
-
2022年世界技能大赛特别赛韩国赛区闭幕式举行 中国已夺8金
-
自习室能否摆脱“二房东”模式 还需要从业者再思考、再探索
-

《生化危机8:村庄》Steam版发布了新的升级补丁 结果出现崩溃Bug
-

据报道:一颗重达303.1克拉的黄色梨形钻石评定为现今全球最大的无瑕疵钻石
-

哪吒汽车:拥有单双电机动力总成 定位两门轿跑
-
河南省将与国家联动投放政府储备猪肉 必要时进一步加大投放力度促进生猪市场平稳运行
-

法国核电厂罢工继续 本轮罢工已经影响该国三分之一的核电厂运行
-

经过多年积累2022年 中国又多了两家进军LNG船的新船厂
-
昙花一现 弱势震荡仍是美股主调
-
协鑫集成的董事会审议通过了相关议案 使用约10亿元募集资金投资建设合肥协鑫公司15GW光伏组件项目
-
万龙滑雪场于2003年开门营业 是崇礼最早开放的雪场之一
-
宁德时代宣布与美国公用事业和分布式光伏+储能开发运营商达成协议
-

消息:moto将是首批商用骁龙8 Gen2旗舰处理器的品牌之一
-
发改委公布了咱们9月份以CPI为代表的经济指数 其中CPI同比上涨了2.8%
-
我国首次在寒武系筇竹寺组地层取得页岩气勘探的重大突破 对推动四川盆地页岩气勘探开发具有重要意义
-

前8月中国服务进出口额增长20.4%-世界热头条
-

汇市紧盯着日本央行是否再次出手干预 而日本政府官员的讲话语带玄机
-

合成生物公司「微构工场」宣布与中国纺织科学院合作,共同开发PHA共混纤维与纯纤维纺织制品-聚焦
-
德昌股份:公司截止2022年9月30日的股东数为14,361-天天动态
-

泸天化:1.没有搬迁至合江的计划;2.截止2022年10月10日,股东户数为59514户-环球热消息
-

美好医疗:公司主要生产家用呼吸机组件,公司也在不断加大医用呼吸机组件的市场拓展-快资讯
-
亨特几乎全部推翻了前财政大臣夸西9月宣布的减税等政策 令英国债市飙升
-
谷歌4K影视内容不再局限高级会员 每年能省近千元费用
-
随着上市公司三季报业绩预告披露加速 哪些公司净利润同比增幅上限超1000%?
-
最新模型数据显示:美国经济在未来12个月内几乎肯定会陷入衰退
-

吉尼斯纪录正式认证星期一为一个周里最糟糕的一天
-
消息称:苹果会在2024年首先推出一款可折叠的iPad 折叠iPhone再等等
-
欧盟修改功耗新规:当前市面上几乎所有8K电视都将面临被禁售的风险
-

日均千万人次收到购物车加满提示 今年天猫或将再次对购物车进行扩容
-
疯狂堆料! 技嘉推出基于RTX 4090 GPU的多款旗舰显卡产品
-
OPPO Watch SE将于10月20日开售 续航可达10天
-
爱玛科技前三季度净利翻倍 同比大增138%至13.76亿元
-
四名印度男子将一台宝马轿车一度开到了200公里/时 结果车毁人亡
-

Intel推送了31.0.101.3491显卡驱动更新 为多款游戏加入了首日支持
-
Tiktok全球日活跃用户数突破10亿 比微信还多1亿
-
联想ThinkVision P27h-30显示器开售 100W满血Type-C接口
-
普利司通计划将“化学回收”方法的技术实现实用化
-

车企出海 擦亮中国品牌-微动态
-

新农开发:我公司较同类型企业产品具有以下优势:1、产业优势-焦点热讯
-

加拿大统计局:有大约140万人在感染新冠病毒之后 出现了长达几个月的症状
-

新安股份业绩预告:前三季度净利润超去年全年 周期穿越能力持续增强-世界今头条
-

小米13普通版通过了工信部3C认证 最高支持67W快充
-
铠侠推出了面向数据中心的新一代XD7P系列硬盘 最高容量7.68TB
-
若琪发布了AR眼镜智能终端Rokid Station 重量比手机轻30%
-
东芝推出首款20TB机械硬盘新品 隶属于MG10产品线
-
天猫在微信中上线了一款名为“天猫超市小铛家”微信小程序
-
俄罗斯公立大学莫斯科电力工程学院的中国校区将建于海南省文昌县
-
闪迪大师PRO-G40移动SSD上市 具备IP68防水/防尘
-
苹果上架新款USB-C充电线 适用于在USB-C设备间进行同步或数据传输
-
Redmi游戏电视X Pro提供65英寸和75英寸两种版本 4K双120Hz高刷屏
-
iPhone 14 Plus出货几周后苹果便削减产能 网友:继续等降价